

Absolute Drehgeber sind in vielen Fällen starken mechanischen Belastungen, elektrischen und magnetischen Feldern ausgesetzt, welche den Einsatzort verseuchen. Um Schmutz, Staub und Flüssigkeiten in der industriellen Umgebung entgegenzuwirken, sind deshalb besondere konstruktive Maßnahmen erforderlich.
Unsere Absolute-Drehgeber sind nach neuesten technischen Erkenntnissen mechanisch robust aufgebaut, die Elektronik ist so kompakt wie möglich gestaltet.
Ein Hauptaugenmerk bei der Störsicherheit gilt der Datenübertragung vom Drehgeber zur Steuerung.
Die Messdaten des Drehgebers müssen von der Steuerung fehlerlos gelesen werden können. Auf keinen Fall dürfen nicht definierte Daten übertragen werden, z. B. beim Schrittwechselpunkt.
Das hier beschriebene Konzept zur sychron-seriellen Datenübertragung für Absolute Drehgeber unterscheidet sich gegenüber parallelen und asynchron-seriellen Übertragungsarten im wesentlichen durch:
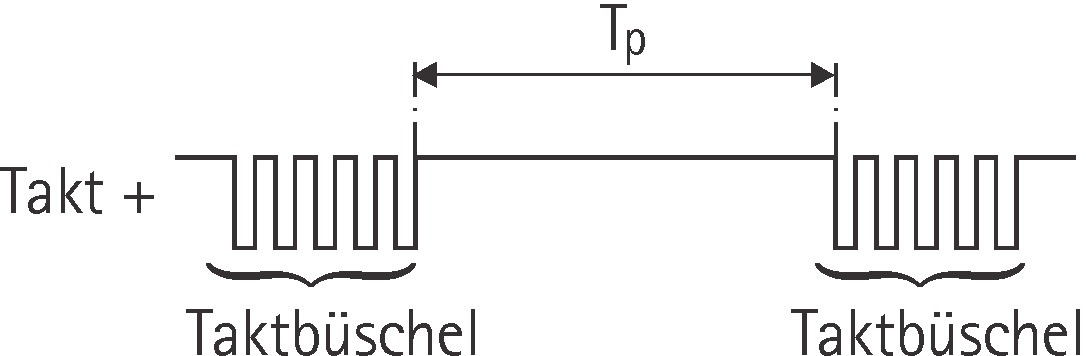
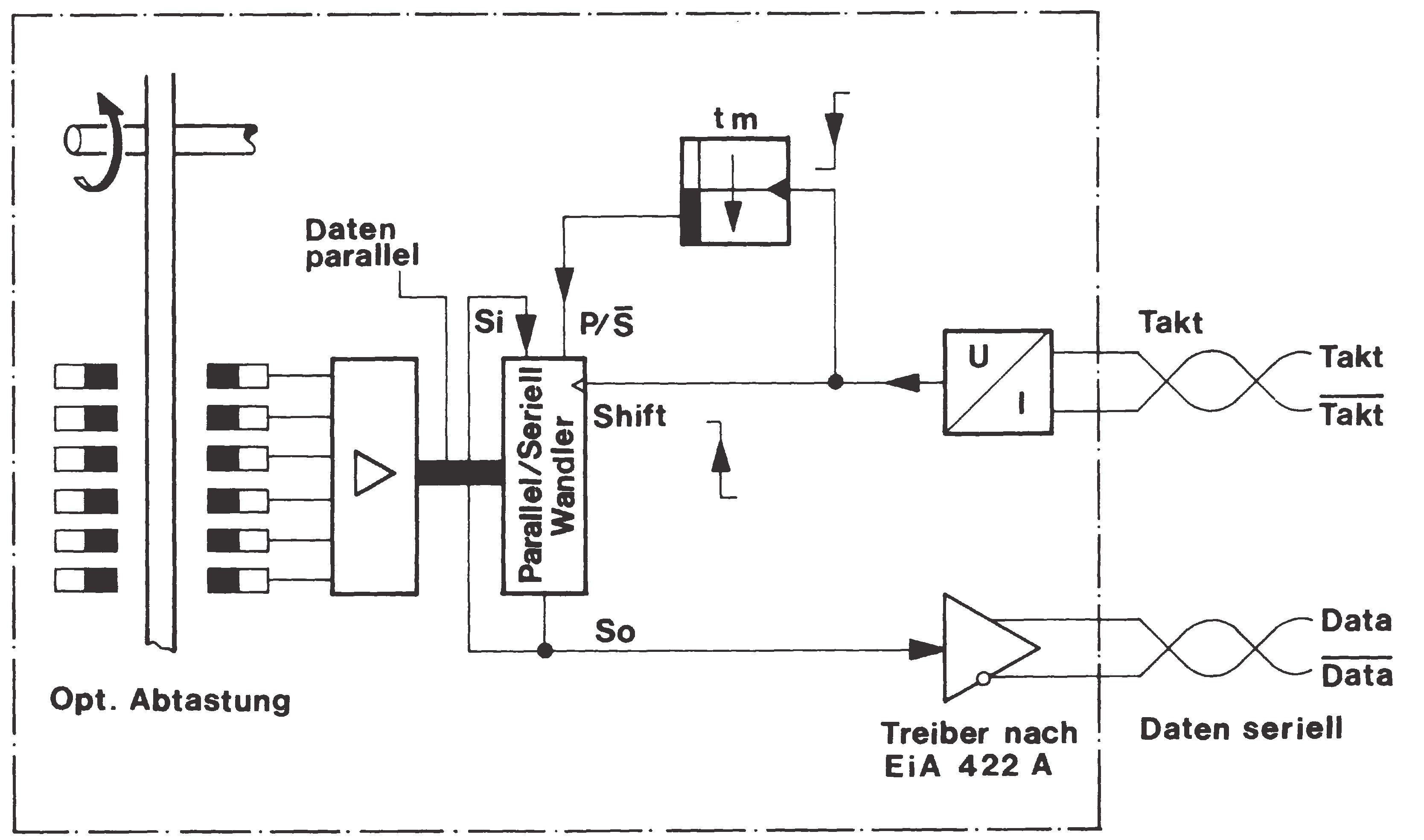
Zur korrekten Übertragung der Daten ist es notwendig, dass eine definierte Anzahl von Impulsen (Taktbüschel) an den Eingang des Absolut-Drehgebers gelegt wird. Daraufhin muss eine Pause TP eingehalten werden. Solange am Drehgeber kein Taktsignal anliegt, ist das geberinterne Parallel/ Seriell- Schieberegister auf parallel geschaltet. Die Daten sind freilaufend und entsprechen jeweils der Stellung der Drehgeberwelle.
Sobald wieder ein Taktbüschel am Takteingang anliegt, wird die momentane Winkelinformation gespeichert. Mit dem ersten Wechsel des Taktsignales von High auf Low wird das drehgeberinterne retriggerbare Monoflop angesteuert, dessen Monoflop- Zeit tm größer als die Periodendauer T des Taktsignales sein muss. Der Ausgang des Monoflops steuert das Parallel/Seriell- Register über den Anschluss P/S (parallel/ seriell).
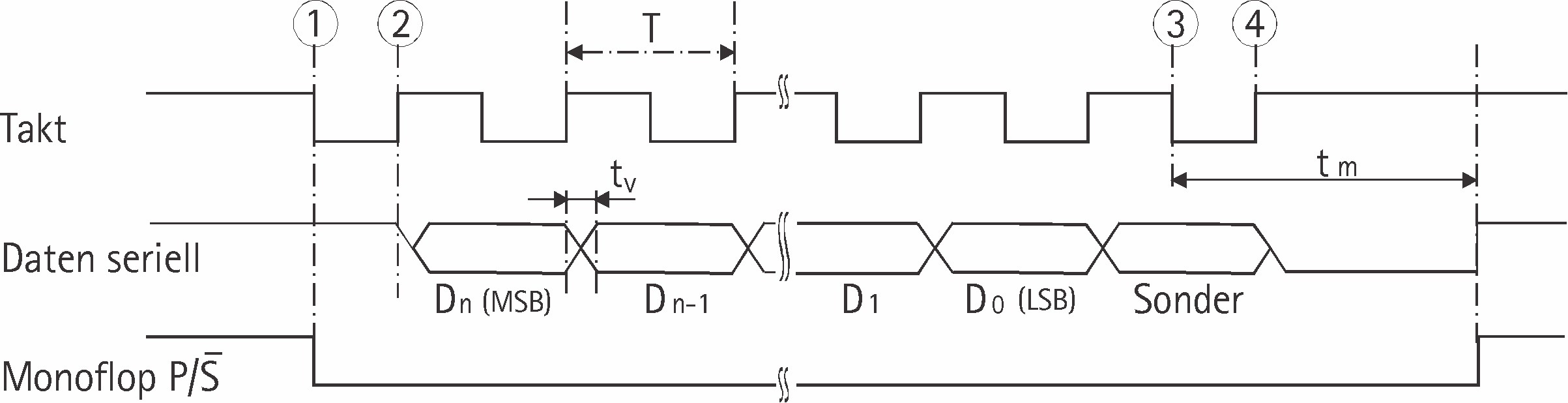
T = Periodendauer des Taktsignals
tm = Monoflopzeit
tm zwischen 10 μs und 30 μs
tv = 100 ns
Die zur Datenübertragung erforderliche Taktanzahl ist unabhängig von der Auflösung des absoluten Drehgebers.
Der Takt kann an jeder Stelle unterbrochen oder für Mehrfach-Abfragen im Ringregister- Betrieb fortgeführt werden.
Mit dem ersten Wechsel des Taktsignales von Low auf High (2) wird das höchstwertige Bit (MSB) der Winkelinformation an den seriellen Datenausgang des Drehgebers gelegt.
Mit jeder weiteren steigenden Flanke wird das nächstniederwertigere Bit an den Datenausgang geschoben.
Nach Übertragung des niederwertigsten Bits (LSB) werden je nach Konfiguration das Alarmbit oder andere Sonderbits übertragen.
Danach schaltet die Datenleitung auf Low (3), bis die Zeit tm abgelaufen ist. Eine weitere Datenübertragung kann erst gestartet werden, wenn die Datenleitung wieder auf High (4) schaltet. Wird der Taktwechsel an der Stelle (3) nicht unterbrochen, wird automatisch der Ringregister-Betrieb aktiv. Das heisst, die beim ersten Taktwechsel (1) gespeicherte Information wird über den Anschluss S0 auf den seriellen Eingang S1 zurückgeführt. Solange der Takt bei (3) nicht unterbrochen wird, können die Daten beliebig oft ausgelesen werden (Mehrfachübertragung).
Die maximale Datenübertragungsrate ist abhängig von der Leitungslänge.
| Leistunglänge | Taktrate |
| < 50 m | < 400 kHz |
| < 100 m | < 300 kHz |
| < 200 m | < 200 kHz |
| < 400 m | < 100 kHz |