
PROFIBUS ermöglicht die Kommunikation von Geräten verschiedener Hersteller ohne besondere Schnittstellenanpassungen. PROFIBUS-DP ist eine auf Geschwindigkeit und niedrige Anschlusskosten optimierte Variante für den schnellen Datenaustausch in der Feldebene. Dabei kommunizieren die zentralen Steuergeräte, wie z. B. SPC/PC, über eine schnelle, serielle Verbindung mit dezentralen Feldgeräten wie Antriebe, Ventile oder Drehgeber. Der Datenaustausch mit diesen dezentralen Geräten erfolgt vorwiegend zyklisch. Die dafür benötigten Kommunikationsfunktionen sind durch die PROFIBUS-DP Grundfunktionen gemäß EN 50 170 festgelegt.

PROFIBUS ist ein herstellerunabhängiger, offener Feldbusstandard für vielfältige Anwendungen in der Fertigungs-, Prozessund Gebäudeautomation. Die Herstellerunanhängigkeit und Offenheit ist in der Norm E 50 170 festgeschrieben.
Der AC 58 ist ein absoluter Drehgeber (Encoder, Winkelcodierer). In der hier beschriebenen Version sendet er über das bertragungsmedium „PROFIBUS-DP“ (physikalisch: verdrillte und abgeschirmte 2-Draht-Leitung) seine aktuelle Position an einen anderen Busteilnehmer sendet. Der AC 58 unterstützt alle im Encoder-Profil aufgeführten Funktionen der Klassen 1 und 2.
Die PROFIBUS-DP Grundfunktionen sind hier nur auszugsweise beschrieben. Weiterführende Informationen finden Sie in der Norm zu PROFIBUS-DP DIN 19245-3 bzw. EN 50170.
In Systemen, in denen die Position eines Antriebes bzw. eines anderen Maschinenteiles erfasst und an eine Steuerung gemeldet erden muss, kann diese Aufgabe von einem AC 58 übernommen werden.
Es lassen sich damit z.B. Positionieraufgaben lösen, in der die Rückmeldung über die aktuelle Antriebsposition von einem AC 58 über PROFIBUS-DP an die Positioniereinheit gemeldet wird.
Die zentrale Steuerung (Master) liest zyklisch die Eingangs-Informationen von den Slaves und schreibt die Ausgangs-Informationen zyklisch an die Slaves. Dabei muss die Buszykluszeit kürzer sein als die Programmzykluszeit der zentralen SPS, die in vielen Anwendungen etwa 10ms beträgt.
Neben der zyklischen Nutzdatenübertragung stehen bei PROFIBUS-DP auch leistungs-fähige Funktionen für Diagnose und Inbetriebnahme zur Verfügung. Der Datenverkehr wird durch Überwachungsfunktionen auf Master- und Slave-Seite überwacht. Die folgende Tabelle zeigt eine Zusammenfassung der PROFIBUS-DP Grundfunktionen.
Übertragungstechnik:
Buszugriff:
Kommunikation:
Betriebszustände:
Synchronisation:
Funktionalität:
Schutzfunktionen:
Gerätetypen:
Für die Übertragung von 512 Bit Eingangsund 512 Bit Ausgangs-Daten verteilt auf 32 Teilnehmer benötigt PROFIBUS-DP nur ca. 1 ms bei 12 Mbit/s.
Die folgende Abbildung zeigt die typische Übertragungszeit von PROFIBUS-DP in Abhängigkeit von der Teilnehmeranzahl und der Übertragungsgeschwindigkeit. Die hohe Geschwindigkeit ist insbesondere darauf zurückzuführen, dass die Übertragung der Ein- und Ausgangs-Daten in einem Nachrichtenzyklus durch Nutzung des SRDDienstes (Send and Receive Data Service) der Schicht 2 durchgeführt wird.
Diagnosefunktionen:
Die umfangreichen Diagnosefunktionen von PROFIBUS-DP ermöglichen die schnelle Fehlerlokalisierung. Die Diagnosemeldungen werden über den Bus übertragen und beim Master zusammengefasst. Sie werden in drei Ebenen eingeteilt:
Stationsbezogene Diagnose
Meldungen zur allgemeinen Betriebsbereitschaft eines Teilnehmers wie z.B. Übertemperatur oder Unterspannung.
Modulbezogene Diagnose
Diese Meldungen zeigen an, dass innerhalb eines bestimmten E/A Teilbereichs (z.B. 8 Bit Ausgangs-Modul) eines Teilnehmers eine Diagnose ansteht.
Kanalbezogene Diagnose
Hier wird die Fehlerursache bezogen auf ein einzelnes Ein- / Ausgangs-Bit (Kanal) angegeben, wie z.B. Kurzschluss auf Ausgang 7.
Buszykluszeit eines PROFIBUS-DP Mono-Master Systems Randbedingungen: jeder Slave hat 2 Byte Eingabe- und 2 Byte Ausgabe-Daten; die minimale Slave-Intervallzeit beträgt 200 Mikrosekunden; TSDR = 11 Bitzeiten
Mit PROFIBUS-DP können Mono- oder Multi-Master Systeme realisiert werden. Dadurch wird ein hohes Maß an Flexibilität bei der Systemkonfiguration ermöglicht. Maximal können 126 Geräte (Master oder Slaves) an einem Bus angeschlossen werden. Die Festlegungen zur Systemkonfiguration beinhalten die Anzahl der Stationen, die Zuordnung der Stationsadresse zu den E/AAdressen, Datenkonsistenz der E/A-Daten, Format der Diagnosemeldungen und die verwendeten Busparameter. Jedes PROFIBUS- DP System besteht aus unterschiedlichen Gerätetypen. Es werden drei Gerätetypen unterschieden:
DP-Master Klasse 1 (DPM1)
Hierbei handelt es sich um eine zentrale Steuerung, die in einem festgelegten Nachrichtenzyklus Informationen mit den dezentralen Stationen (DP-Slaves) austauscht. Typische Geräte sind z.B. Speicherprogrammierbare Steuerungen (SPS), PC- oder VME-Systeme.
DP-Master Klasse 2 (DPM2)
Geräte dieses Typs sind Programmier-, Projektierungs- oder Bedien-Geräte. Sie werden bei der Inbetriebnahme eingesetzt, um die Konfiguration des DP-Systems zu erstellen, oder zur Anlagenbedienung im laufenden Betrieb verwendet.
DP-Slave
Ein DP-Slave ist ein Peripheriegerät (E/A, Antriebe, HMI, Ventile), das Eingangsinformationen einliest und Ausgangsinformationen an die Peripherie abgibt. Es sind auch Geräte möglich, die nur Eingangs- oder nur Ausgangsinformationen bereitstellen. Die Menge der Eingangs- und Ausgangsinformationen ist geräteabhängig und darf max. 246 Byte Eingangs- und 246 Byte Ausgangsdaten betragen.
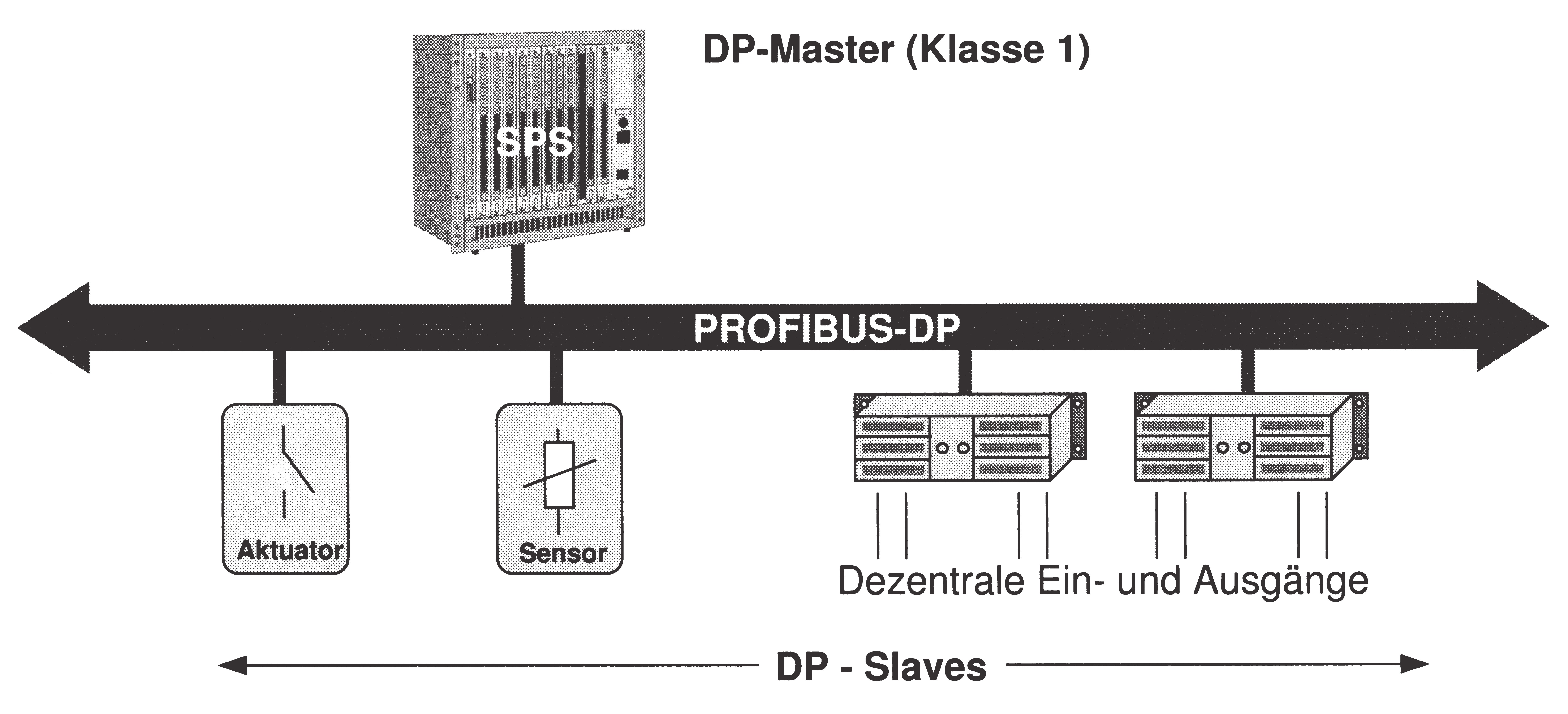
Bei Mono-Master-Systemen ist in der Betriebsphase des Bussystems nur ein Master am Bus aktiv. In der Abbildung (oben) ist die Systemkonfiguration eines Mono- Master Systems dargestellt.
Die SPS-Steuerung ist die zentrale Steuerungskomponente. Die DP-Slaves sind über das Übertragungsmedium dezentral an die SPS-Steuerung gekoppelt. Mit dieser Systemkonfiguration wird die kürzeste Buszykluszeit erreicht.
Im Multi-Master-Betrieb befinden sich an einem Bus mehrere Master. Sie bilden entweder voneinander unabhängige Sub-systeme, bestehend aus je einem DPM1 und den zugehörigen DP-Slaves, oder zusätzliche Projektierungs- und Diagnosegeräte (siehe Abbildung unten). Die Eingangs- und Ausgangs-Abbilder der DP-Slaves können von allen DP-Mastern gelesen werden. Das Schreiben der Ausgänge ist nur für einen DP-Master (den bei der Projektierung zugeordneten DPM1) möglich. Multi-Master Systeme erreichen eine mittlere Buszykluszeit.
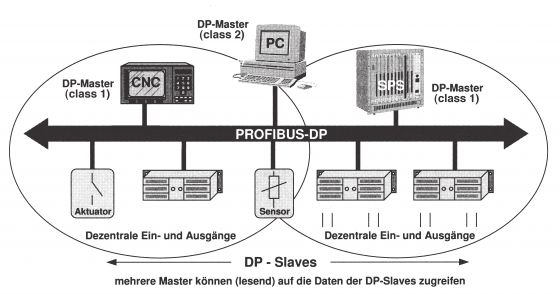
PROFIBUS-DP Multi-Master System
Um eine weitgehende Geräteaustauschbarkeit zu erreichen, wurde bei PROFIBUSDP auch das Systemverhalten standardisiert. Es wird im wesentlichen durch den Betriebs-zustand des DPM1 bestimmt. Dieser kann entweder lokal oder über den Bus vom Projektierungs-Gerät gesteuert werden. Es werden folgende drei Hauptzustände unterschieden:
Stop
Es findet kein Datenverkehr zwischen dem DPM1 und den DP-Slaves statt.
Clear
Der DPM1 liest die Eingangsinformationen der DP-Slaves und hält die Ausgänge der DP-Slaves im sicheren Zustand.
Operate
Der DPM1 befindet sich in der Datentransferphase. In einem zyklischen Datenverkehr werden die Eingänge von den DP-Slaves gelesen und die Ausgangsinformationen an die DP-Slaves übertragen.
Der DPM1 sendet seinen lokalen Status in einem konfigurierbaren Zeitintervall mit einem Multicast-Kommando zyklisch an alle ihm zugeordneten DP-Slaves.
Die Systemreaktion nach dem Auftreten eines Fehlers in der Datentransferphase des DPM1, wie z. B. Ausfall eines DP-Slaves, wird durch den Betriebsparameter „Auto- Clear“ bestimmt.
Wurde dieser Parameter auf True gesetzt, dann schaltet der DPM1 die Ausgänge aller zugehörigen DP-Slaves in den sicheren Zustand, sobald ein DP-Slave nicht mehr bereit ist für die Nutzdatenübertragung.Danach wechselt der DPM1 in den Clear-Zustand.
Ist dieser Parameter = False, dann verbleibt der DPM1 auch im Fehlerfall im Operate- Zustand, und der Anwender kann die Systemreaktion selbst bestimmen.
Der Datenverkehr zwischen dem DPM1 und den ihm zugeordneten DP-Slaves wird in einer festgelegten, immer wiederkehrenden Reihenfolge automatisch durch den DPM1 abgewickelt. Bei der Projektierung des Bus-systems legt der Anwender die Zugehörigkeit eines DP-Slaves zum DPM1 fest. Weiterhin wird definiert, welche DPSlaves in den zyklischen Nutzdatenverkehr aufgenommen oder ausgenommen werden sollen.
Der Datenverkehr zwischen dem DPM1 und den DP-Slaves gliedert sich in die Parametrierungs-, Konfigurierungs- und Datentransfer-Phasen. Bevor ein DP-Slave in die Datentransferphase aufgenommen wird, prüft der DPM1 in der Parametrierungs-und Konfigurations-Phase, ob die projektierte Sollkonfiguration mit der tatsächlichen Gerätekonfiguration übereinstimmt.
Bei dieser Überprüfung müssen der Gerätetyp, die Format- und Längeninformationen sowie die Anzahl der Ein- und Ausgänge übereinstimmen. Der Benutzer erhält dadurch einen zuverlässigen Schutz gegen Parametrierungsfehler. Zusätzlich zum Nutzdatentransfer, der vom DPM1 automatisch durchgeführt wird, besteht die Möglichkeit, neue Parametrierungsdaten auf Anforderung des Benutzers an die DP-Slaves zu senden.
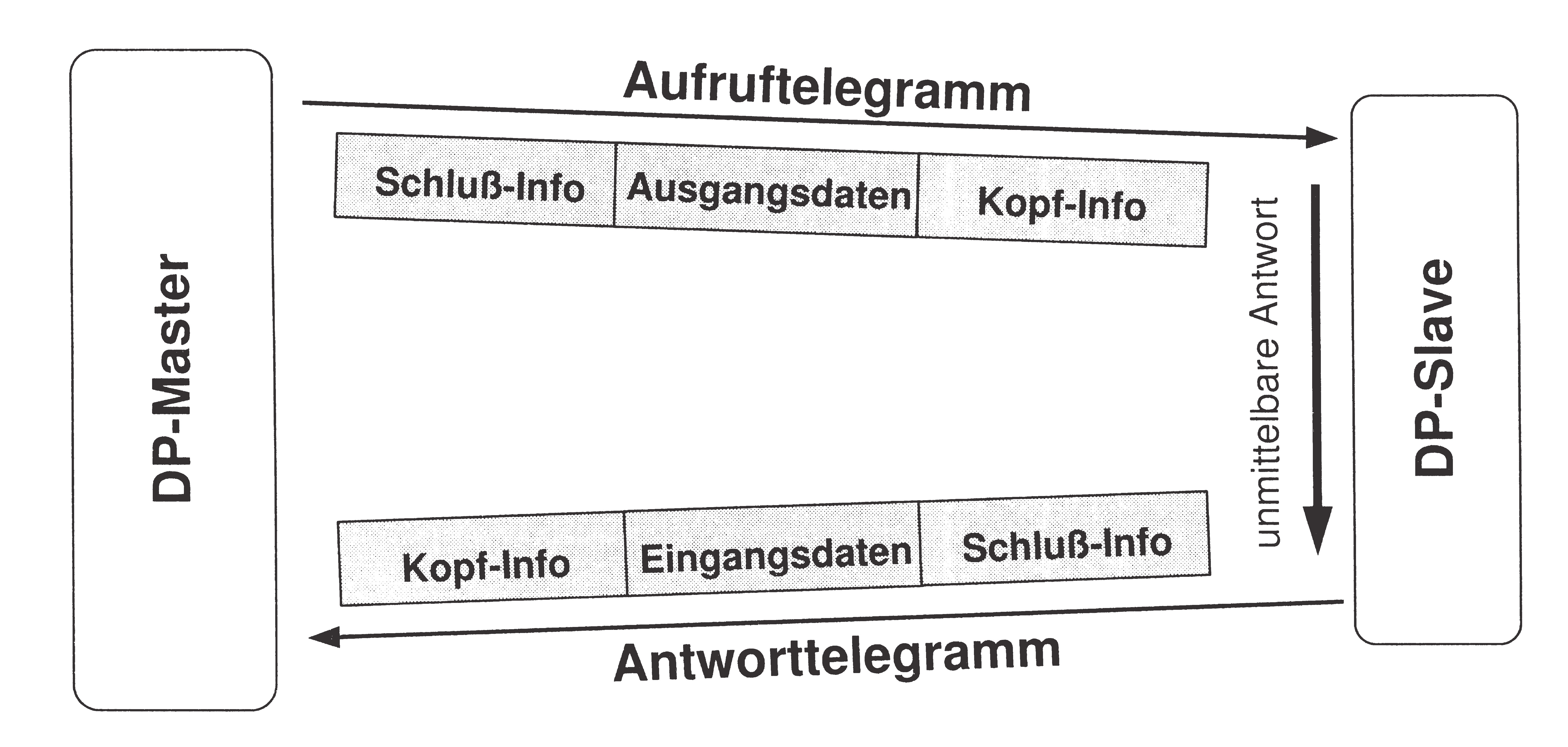
Nutzdatenübertragung bei PROFIBUS-DP
Ergänzend zu den Funktionen zwischen DP-Master und DP-Slaves stehen Master- Master Kommunikationsfunktionen zur Verfügung, siehe Tabelle. Sie ermöglichen den Projektierungs- und Diagnosegeräten, das System über den Bus zu projektieren.
Zusätzlich zu den Upload- und Download- Funktionen bieten die Master-Master Funktionen die Möglichkeit, den Nutzdatentransfer zwischen dem DPM1 und einzelnen DP-Slaves dynamisch ein- oder auszuschalten sowie den Betriebszustand des DPM1 zu verändern.
|
Funktion Get_Master_Diag |
Bedeutung Lesen der Diagnosedaten des DPM1 oder der Sammeldiagnose der DP-Slaves. |
DPM1 P |
DPM2 O |
| Download / Upload Gruppe (Start_Seq, Down/ Upload, End_Seq) Act_Para_Brct |
Laden oder Lesen der gesamten Konfigurationsdaten eines DPM1 und der zugehörigen DP-Slaves. Aktivieren der Busparameter gleichzeitig bei allen angesprochenen DPM1-Geräten |
O
|
O
|
| Act_Param | Aktivieren von Parametern oder Änderung des Betriebszustandes beim angesprochenen DPM1-Gerät. | O | O |
P: Pflicht, O: Option
Funktionsübersicht für die Master-Master Funktionen bei PROFIBUS-DP
Zusätzlich zum teilnehmerbezogenen Nutzdatenverkehr, der automatisch vom DPM1 abgewickelt wird, besteht für die Master dieMöglichkeit, Steuerkommandos an einen, eine Gruppe oder an alle Slaves gleichzeitig zu senden. Diese Steuerkommandos werden als Multicast übertragen. Sie ermöglichen die Sync- und Freeze- Betriebsarten zur ereignisgesteuerten Synchronisation der DP-Slaves. Die Slaves beginnen den Sync- Mode, wenn sie vom zugeordneten Master ein Sync-Kommando empfangen.
Daraufhin werden bei allen adressierten Slaves die Ausgänge im momentanen Zustand eingefroren. Bei den folgenden Nutzdatenübertragungen werden die Ausgangsdaten bei den Slaves gespeichert, die Ausgangszustände bleiben jedoch unverändert. Erst nach Empfang des nächsten Sync-Befehls werden die gespeicherten Ausgangsdaten an die Ausgänge durchgeschaltet. Mit Unsync wird der Sync-Betrieb beendet.
Aus Sicherheitsgründen ist es erforderlich, PROFIBUS-DP mit wirksamen Schutzfunktionen gegen Fehlparametrierung oder Ausfall der Übertragungseinrichtungen zu versehen. Es werden dazu Überwachungsmechanismen beim DP-Master und bei den DP-Slaves in Form von Zeitüberwachungen realisiert. Das Überwachungsintervall wird bei der Projektierung festgelegt.
Beim DP-Master
Der DPM1 überwacht den Datenverkehr der Slaves mit dem Data_Control_Timer. Für jeden Slave wird ein eigener Zeitgeber benutzt. Die Zeitüberwachung spricht an, wenn innerhalb eines Überwachungsintervalls kein ordnungsgemäßer Nutzdatentransfer erfolgt. In diesem Fall wird der Benutzer informiert. Falls die automatische Fehlerreaktion (Auto_Clear = True) freige- geben wurde, verlässt der DPM1 den Operate-Zustand, schaltet die Ausgänge der zugehörigen Slaves in den sicheren Zustand und geht in den Clear-Zustand über.
Beim DP-Slave
Der Slave führt zur Erkennung von Fehlern des Masters oder der Übertragung die Ansprechüberwachung durch. Findet innerhalb des Ansprechüberwachungsintervalls kein Datenverkehr mit dem Master statt, so schaltet der Slave die Ausgänge selbständig in den sicheren Zustand.
Zusätzlich ist für die Ein- und Ausgänge der DP-Slaves beim Betrieb in Multi-Master- Systemen ein Zugriffsschutz erforderlich. Damit ist sichergestellt, dass der direkte Zugriff nur vom berechtigten Master erfolgt. Für alle anderen Master stellen die Slaves ein Abbild der Eingänge und Ausgänge zur Verfügung, das auch ohne Zugriffsberechtigung gelesen werden kann.
Die Kommunikations-Schnittstelle entspricht dem PROFIBUS-DP Encoder Profil Klasse 2.
Darin sind die Funktionen der Klasse 1 enthalten.