

In molti casi, gli encoder rotativi assoluti sono esposti a forti sollecitazioni meccaniche, campi elettrici e magnetici, che influenzano il luogo in cui vengono utilizzati. Per contrastare lo sporco, la polvere e i liquidi in un ambiente industriale, sono quindi necessarie speciali misure di progettazione.
I nostri encoder rotativi assoluti sono robusti dal punto di vista meccanico secondo le più recenti conoscenze tecniche e l'elettronica è progettata per essere quanto più compatta possibile.
Un punto focale della resistenza alle interferenze dei nostri encoder è la trasmissione dei dati dall'encoder rotativo al sistema di controllo.
Il sistema di controllo deve essere in grado di leggere i dati di misura dell'encoder rotativo senza errori. Non devono mai essere trasmessi dati non definiti, ad es. al punto di cambio di passo.
La struttura qui descritta per la trasmissione seriale sincrona dei dati per encoder rotativi assoluti si differenzia dai tipi di trasmissione seriale parallela e asincrona essenzialmente per:
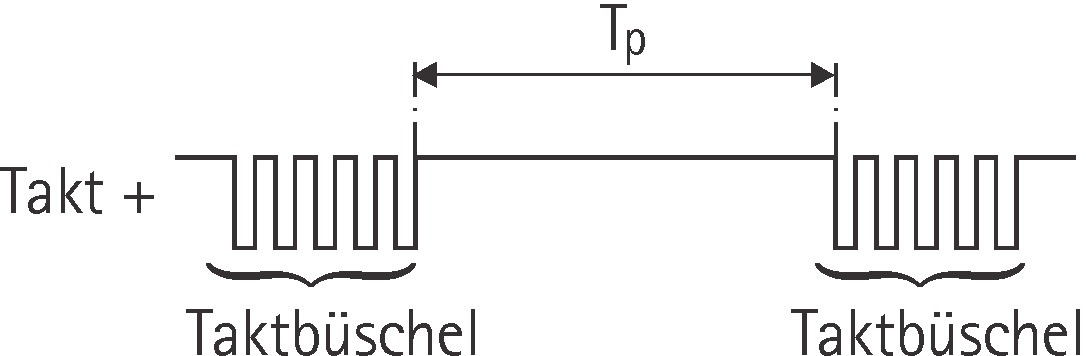
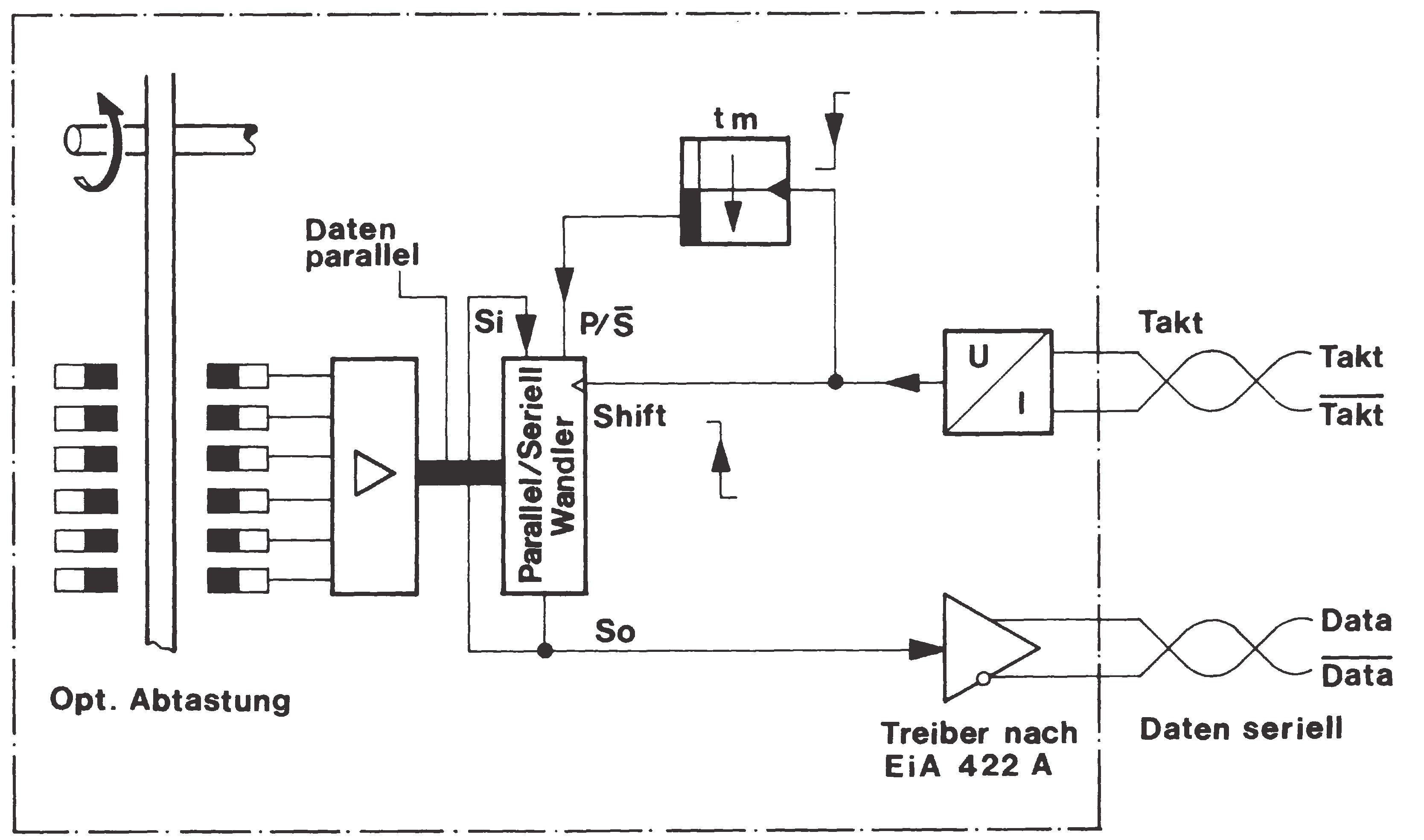
Per una corretta trasmissione dei dati è necessario applicare un numero definito di impulsi (burst di impulsi di clock) all'ingresso dell'encoder rotativo assoluto. Successivamente è necessario rispettare un tempo di attesa (TP). Finché non è presente un segnale di impulso di clock sull'encoder rotativo, il registro di spostamento parallelo / seriale all'interno dell'encoder viene commutato in parallelo. I dati vengono trasmessi in modo continuo e registrano la posizione dell'albero dell'encoder rotativo.
Non appena è di nuovo presente un gruppo di impulsi di clock all'ingresso dell'impulso di clock, i dati dell'angolo corrente vengono salvati. Quando il segnale dell'impulso di clock passa da alto a basso per la prima volta, il monoflop recuperabile (circuito monostabile) nell'encoder rotativo viene attivato e il tempo monoflop tm deve essere maggiore del periodo di tempo T del segnale dell'impulso di clock. L'uscita del monoflop controlla il registro parallelo / seriale tramite il connettore P/S (parallelo / seriale).
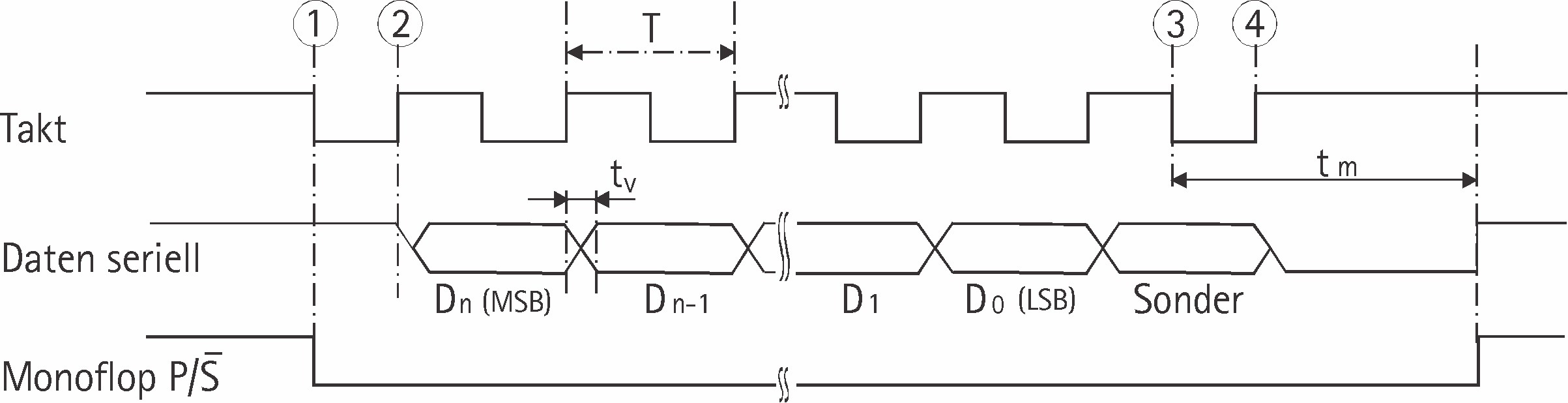
T = periodo del segnale di impulso di clock
tm = tempo monoflop
tm tra 10 μs e 30 μs
tempo tv = 100 nanosecondi
Il numero di impulsi di clock necessari per la trasmissione dei dati è indipendente dalla risoluzione dell'encoder rotativo assoluto.
Il ciclo di impulsi può essere interrotto in qualsiasi punto o continuato per interrogazioni multiple in modalità “ring register”.
Quando il segnale dell'impulso di clock passa da basso ad alto (2) per la prima volta, il bit più significativo (MSB) dei dati angolari viene applicato all'uscita seriale dei dati dell'encoder rotativo.
Ad ogni ulteriore fronte di salita, il successivo bit inferiore viene spostato all'uscita dati.
Dopo la trasmissione del bit meno significativo (LSB), a seconda della configurazione, viene trasmesso il bit di allarme o altri bit speciali.
La linea dati passa quindi a basso (3) fino allo scadere del tempo monoflop tm. Un'ulteriore trasmissione dati può essere avviata solo quando la linea dati passa nuovamente in alto (4). Se la modifica dell'impulso di clock al punto (3) non viene interrotta, si attiva automaticamente il funzionamento “ring register”. Ciò significa che i dati memorizzati al primo cambio di impulso di clock (1) vengono inviati nuovamente all'ingresso seriale S1 tramite il collegamento S0. Finché l'impulso di clock al punto (3) non viene interrotto, i dati possono essere letti con la frequenza necessaria (trasmissione multipla dei dati).
La velocità di trasmissione dati massima dipende dalla lunghezza del cavo.
| Alimentazione e lunghezza del cavo | Velocità di impulsi di clock |
| < 50 m | < 400 kHz |
| < 100 m | < 300 kHz |
| < 200 m | < 200 kHz |
| < 400 m | < 100 kHz |