
PROFIBUS Decentralised Peripherals consente la comunicazione tra dispositivi di diversi produttori senza speciali adattamenti dell'interfaccia. PROFIBUS-DP è una variante ottimizzata per la velocità e i costi di collegamento contenuti per lo scambio veloce dei dati nelle relative applicazioni. Consente ai dispositivi di controllo centrali, come SPC (Stored Program Control) / PC, di comunicare attraverso un collegamento veloce e seriale con specifiche periferiche come azionamenti, valvole o encoder rotativi. Lo scambio di dati con queste periferiche è principalmente ciclico.

Le funzioni di comunicazione necessarie a questo scopo sono definite dalle funzioni di base di PROFIBUS-DP secondo lo standard EN 50 170. PROFIBUS è uno standard per bus di campo aperti, indipendente dal produttore, per diverse applicazioni nella produzione, nei processi e nell'automazione degli edifici.
L'indipendenza dai produttori e l'apertura sono definite nello standard EN 50 170. L'AC 58 è un encoder rotativo assoluto (encoder, encoder angolare). Nella versione qui descritta, l'encoder invia la sua posizione attuale a un altro dispositivo bus attraverso il mezzo di trasmissione "PROFIBUS-DP" (esecuzione fisica: doppino ritorto e schermato). L'encoder AC 58 supporta tutte le funzioni delle classi 1 e 2 elencate nel profilo dell'encoder.
Le funzioni del PROFIBUS-DP (DP: Decentralised Peripherals) di base sono descritte qui solo in parte. Ulteriori informazioni sono riportate nello standard per PROFIBUS-DP DIN 19245-3 o nello standard EN 50170.
Nei sistemi in cui la posizione di un azionamento o di un altro componente della macchina deve essere registrata e segnalata a un sistema di controllo, questo compito può essere eseguito da un encoder AC 58.
In questo modo, le attività di posizionamento possono essere risolte, ad esempio nei casi in cui il feedback sulla posizione attuale dell'azionamento viene segnalato da un encoder AC58 all'unità di posizionamento tramite il PROFIBUS-DP.
Il controller centrale (master) legge ciclicamente le informazioni in ingresso dagli slave e scrive ciclicamente le informazioni in uscita verso gli slave. A tale scopo, il tempo di ciclo del bus deve essere più breve del tempo di ciclo del programma del controllore logico programmabile (PLC) centrale, che in molte applicazioni è di circa 10 millisecondi.
Oltre alla trasmissione ciclica dei dati utente, sono inoltre disponibili funzioni ad alte prestazioni per la diagnosi e la messa in servizio con il PROFIBUS-DP. Il traffico dati viene monitorato da funzioni di monitoraggio sul lato master e sul lato slave.
La seguente tabella riassume le funzioni di base del PROFIBUS-DP (Decentralised Peripherals).
Tecnologia di trasmissione:
Accesso al bus:
Comunicazione:
Condizioni operative:
Sincronizzazione:
Funzionalità:
Funzioni di protezione:
Tipi di dispositivi:
Per la trasmissione di dati di ingresso a 512 bit e di dati di uscita a 512 bit inviati a 32 dispositivi collegati, PROFIBUS-DP necessita solo di circa 1 millisecondo a 12 Mbit al secondo.
Nella figura seguente viene mostrato il tempo di trasmissione tipico del PROFIBUS-DP a seconda del numero di dispositivi collegati e della velocità di trasmissione. L'elevata velocità è dovuta in particolare al fatto che la trasmissione dei dati in ingresso e in uscita viene effettuata in un unico ciclo di messaggi utilizzando il servizio SRD (Send and Receive Data) di livello 2.
Funzioni diagnostiche:
Le funzioni diagnostiche avanzate del PROFIBUS-DP consentono una rapida localizzazione dei guasti. I messaggi diagnostici vengono trasmessi attraverso il bus e raccolti dal master.
I messaggi sono suddivisi in tre livelli
Messaggi di diagnosi specifici per la posizione sulla prontezza operativa generale di un dispositivo collegato, come ad esempio una temperatura eccessiva o sottotensione.
Diagnosi specifica del modulo
Questi messaggi mostrano che è necessaria una diagnosi in una determinata sezione di ingresso / uscita (ad es. un modulo di uscita a 8 bit) di un dispositivo collegato.
Diagnostica specifica del canale
Qui viene specificata la causa dell'errore, identificando un singolo bit di ingresso / uscita (canale), come ad esempio un corto circuito sull'uscita 7.
Tempo di ciclo del bus di un sistema mono-master PROFIBUS-DP, condizioni limite: ogni slave ha 2 byte di dati in ingresso e 2 byte di dati in uscita; il tempo minimo di intervallo dello slave è di 200 microsecondi; TSDR (Time Series Data Repository) = 11 tempi di bit.
Con PROFIBUS-DP si possono configurare sistemi mono-master o multi-master. Ciò consente un elevato grado di flessibilità nella configurazione del sistema. Ad un bus possono essere collegati al massimo 126 dispositivi (master o slave). Le specifiche di configurazione del sistema comprendono il numero di dispositivi, l'assegnazione dell'indirizzo del dispositivo agli indirizzi di ingresso / uscita, la consistenza dei dati di ingresso / uscita, il formato dei messaggi di diagnostica e i parametri del bus utilizzati.
Master DP (Decentralised Peripherals) classe 1 (DPM1)
Si tratta di un controllore centrale che scambia informazioni con i dispositivi decentralizzati (slave DP) in un ciclo di messaggi definito. I dispositivi tipici sono, ad esempio, i controllori logici programmabili (PLC), i sistemi PC o VME (Virtual Machine Environment).
DP-Master Klasse 2 (DPM2)
In questo tipo rientrano i dispositivi di programmazione, di progettazione o di funzionamento. Questi vengono utilizzati durante la messa in servizio per creare la configurazione del sistema DP o per il funzionamento del sistema quando il sistema è in uso.
Slave DP
Uno slave DP è un dispositivo periferico (ingresso / uscita, azionamenti, interfaccia HMI, valvole) che legge le informazioni in ingresso e trasmette le informazioni in uscita ai dispositivi periferici. Sono possibili anche dispositivi che forniscono solo dati di ingresso o solo dati di uscita. La quantità di dati di ingresso e di uscita dipende dal dispositivo e non può superare i 246 byte di dati in ingresso e i 246 byte di dati in uscita.
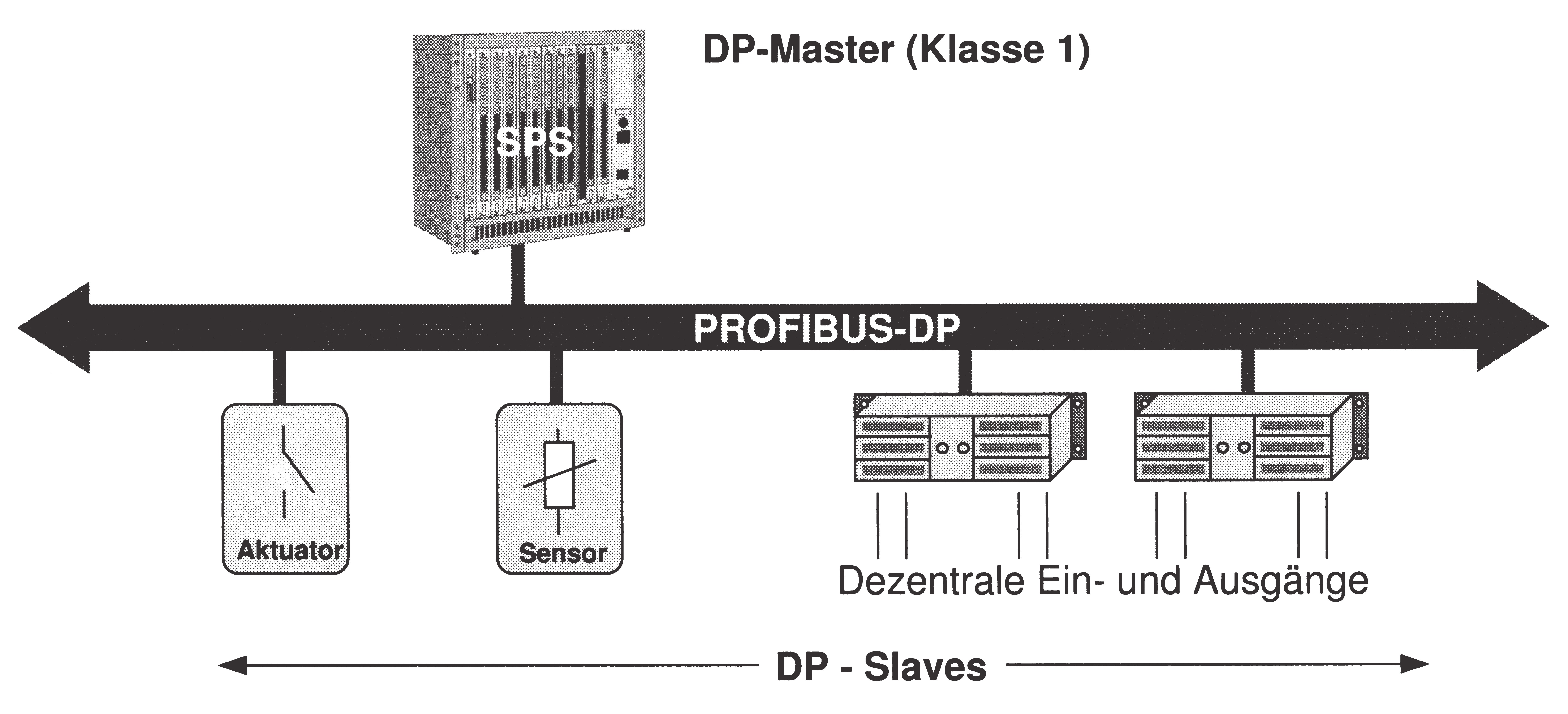
Con sistemi mono-master, solo un master è attivo sul bus quando il sistema bus è in funzione. Nella figura sopra viene mostrata la configurazione del sistema di un sistema mono-master.
Il controllore PLC è il componente di controllo centrale. Gli slave DP sono collegati come periferiche al controllore PLC attraverso il mezzo di trasmissione. Con questa configurazione di sistema si ottiene il più breve tempo di ciclo del bus.
Nel funzionamento multi-master, sono presenti diversi master su un unico bus. Formano dei sotto-sistemi indipendenti l'uno dall'altro, ciascuno composto da un master DPM1 e dai relativi slave DP dipendenti oppure da ulteriori dispositivi di progettazione e di diagnostica (vedere figura seguente).
Le immagini in ingresso e in uscita degli slave DP possono essere lette da tutti i master DP. Le uscite possono essere scritte solo da un master DP (il DPM1 assegnato durante la configurazione). I sistemi multi-master raggiungono un tempo di ciclo medio del bus.
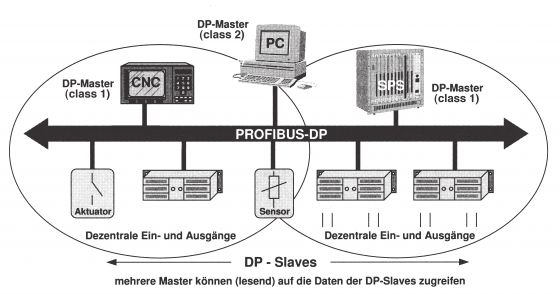
PROFIBUS-DP Sistema Multi-Master
Per ottenere un'ampia intercambiabilità dei dispositivi, è stato standardizzato anche il comportamento di sistema del PROFIBUSDP. Esso è determinato essenzialmente dallo stato di funzionamento del DPM1. Questo può essere controllato sia localmente che tramite il bus dal dispositivo di configurazione. Si distingue tra i seguenti tre stati principali:
.Stop
Non c'è traffico di dati tra il DPM1 e gli slave DP.
Clear
Il DPM1 legge le informazioni di ingresso degli slave DP e mantiene le uscite degli slave DP in uno stato sicuro.
Operate
Il DPM1 è in fase di trasferimento dati Nel traffico dati ciclico, gli ingressi vengono letti dagli slave DP e le informazioni di uscita vengono trasferite agli slave DP.
.Il DPM1 invia ciclicamente il suo stato locale a tutti gli slave DP assegnati in un intervallo di tempo configurabile con un comando multicast.
La reazione del sistema dopo il verificarsi di un errore nella fase di trasferimento dati del DPM1, come ad esempio il guasto di uno slave DP, è determinata dal parametro operativo "Auto- Clear".
.Se questo parametro è impostato su True, il DPM1 commuta le uscite di tutti gli slave DP associati allo stato di sicurezza non appena uno slave DP non è più pronto per la trasmissione dei dati utente. Successivamente il DPM1 passa allo stato clear.
Se questo parametro = Falso, allora il DPM1 rimane nello stato operativo anche in caso di errore, e l'utente può determinare la risposta del sistema da solo.
Il traffico di dati tra il DPM1 e gli slave DP ad esso assegnati viene gestito automaticamente dal DPM1 in una sequenza fissa e ricorrente. Durante la configurazione del sistema bus, l'utente definisce l'assegnazione di uno slave DP al DPM1. Inoltre, si definisce quali slave DP devono essere inclusi o esclusi dal traffico ciclico di dati utente.
.Il traffico dati tra il DPM1 e gli slave DP è suddiviso nelle fasi di parametrizzazione, configurazione e trasferimento dati. Prima che uno slave DP venga incluso nella fase di trasferimento dati, il DPM1 controlla nella fase di parametrizzazione e di configurazione se la configurazione del riferimento configurata corrisponde alla configurazione effettiva dell'apparecchio.
Il DPM1 viene poi utilizzato per trasferire i dati allo slave DP.Per questo controllo, le informazioni sul tipo di apparecchio, il formato e la lunghezza, nonché il numero di ingressi e uscite devono corrispondere. Ciò fornisce all'utente una protezione affidabile contro gli errori di parametrizzazione. Oltre al trasferimento dei dati utente, che viene effettuato automaticamente dal DPM1, è possibile inviare nuovi dati di parametrizzazione agli slave DP su richiesta dell'utente.
.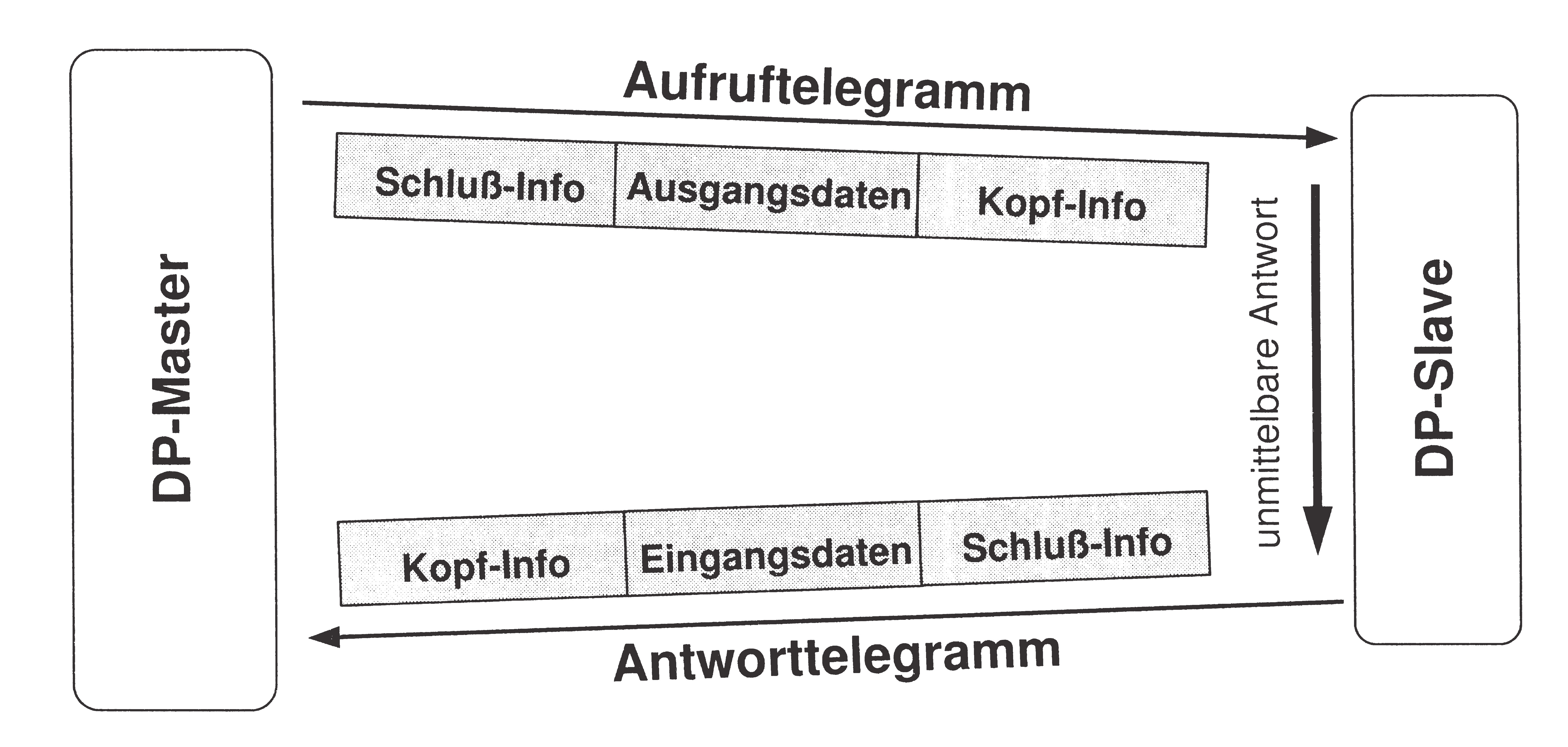
trasmissione dati utente con PROFIBUS-DP
Oltre alle funzioni tra master DP e slave DP, sono disponibili anche funzioni di comunicazione master-master, vedi tabella. Essi consentono ai dispositivi di configurazione e diagnosi di configurare il sistema tramite il bus.
Oltre alle funzioni di upload e download, le funzioni master-master offrono la possibilità di attivare o disattivare dinamicamente il trasferimento dei dati utente tra il DPM1 e i singoli slave DP e di modificare lo stato di funzionamento del DPM1.
|
Funzione Get_Master_Diag |
Significato Leggere i dati diagnostici del DPM1 o la diagnostica collettiva degli slave DP. |
DPM1 P |
DPM2 O |
| Scarica / Carica Gruppo (Start_Seq, Down/ Upload, End_Seq) Act_Para_Brct |
Caricamento o lettura dei dati di configurazione completi di un DPM1 e dei corrispondenti slave DP. Attivazione dei parametri del bus contemporaneamente per tutti i dispositivi DPM1 indirizzati |
O
|
O
|
| Act_Param | Attivazione dei parametri o modifica dello stato di funzionamento del dispositivo DPM1 indirizzato. | O | O |
P: Dovere, O: Option
Panoramica delle funzioni per il master-master Funzioni con PROFIBUS-DP
Oltre al traffico di dati utente relativo agli abbonati, che viene gestito automaticamente dal DPM1, il master può inviare comandi di controllo a uno, a un gruppo o a tutti gli slave contemporaneamente. Questi comandi di controllo vengono trasmessi come multicast. Attivano le modalità operative Sync e Freeze per la sincronizzazione controllata dagli eventi degli slave DP. Gli slave avviano la modalità di sincronizzazione quando ricevono un comando di sincronizzazione dal master assegnato.
Le uscite di tutti gli slave indirizzati vengono poi congelate nel loro stato attuale. Durante le seguenti trasmissioni di dati utente, i dati di uscita vengono memorizzati presso gli Slave, ma gli stati di uscita rimangono invariati. I dati di uscita memorizzati vengono commutati sulle uscite solo dopo la ricezione del successivo comando Sync. Con Unsync l'operazione di sincronizzazione è terminata.
Per motivi di sicurezza è necessario dotare il PROFIBUS-DP di efficaci funzioni di protezione contro la parametrizzazione errata o il guasto dell'apparecchiatura di trasmissione. A questo scopo, nel DP Master e nei DP Slave vengono implementati meccanismi di monitoraggio sotto forma di monitoraggio del tempo. L'intervallo di monitoraggio viene definito durante la pianificazione del progetto.
Al DP master
Il DPM1 monitora il traffico dati degli slave con il Data_Control_Timer Per ogni slave viene utilizzato un timer separato. Il monitoraggio del tempo risponde se non avviene un corretto trasferimento dei dati utente entro un intervallo di monitoraggio. In questo caso l'utente viene informato. Se la risposta automatica all'errore (Auto_Clear = True) è stata abilitata, il DPM1 esce dallo stato di funzionamento, commuta le uscite degli slave associati allo stato di sicurezza e passa allo stato clear.
Al DP-Slave
Lo slave esegue il monitoraggio della risposta per rilevare errori di master o di trasmissione. Se non c'è traffico di dati con il master entro l'intervallo di monitoraggio della risposta, lo slave passa automaticamente le uscite allo stato sicuro.
E' necessaria un'ulteriore protezione di accesso per gli ingressi e le uscite degli slave DP quando si opera in sistemi multi-master. In questo modo si garantisce che l'accesso diretto sia concesso solo dal master autorizzato. Per tutti gli altri master, gli slave forniscono un'immagine degli ingressi e delle uscite che può essere letta anche senza autorizzazione di accesso.
L'interfaccia di comunicazione corrisponde al profilo dell'encoder PROFIBUS-DP classe 2.
.comprende le funzioni della classe 1.
.