
L'interfaccia digitale bidirezionale per sensori BiSS assicura la comunicazione tra il trasmettitore di posizione e il dispositivo di misura o il controllo dell'azionamento e trasmette allo stesso tempo i valori misurati da un massimo di 8 sensori, se necessario. Per da 1 a 8 dispositivi collegati, il master di interfaccia fornisce il segnale ad impulsi di clock per l'acquisizione simultanea di tutti i dati di posizione e per la successiva trasmissione seriale sincrona dei dati.
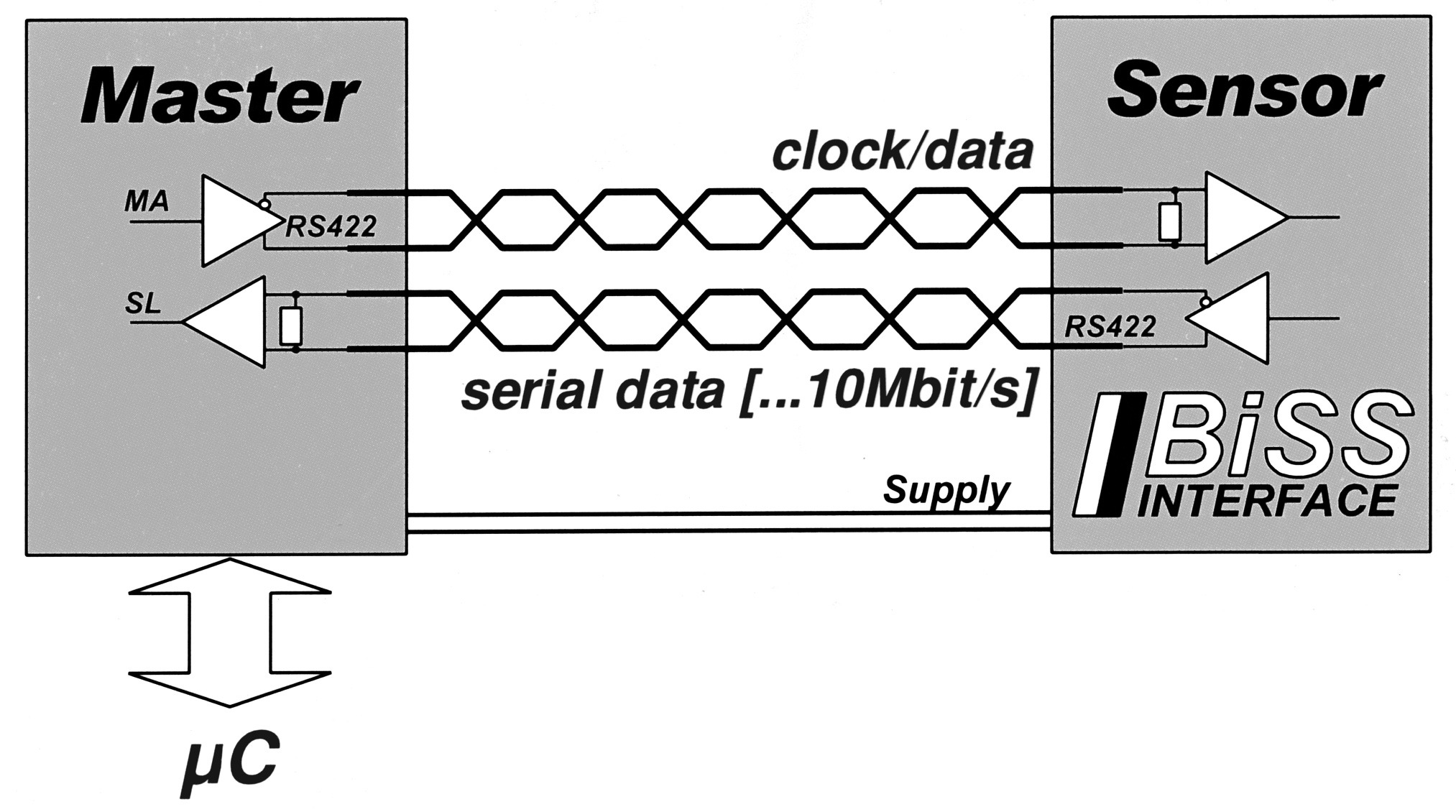
Sono necessarie solo quattro linee dati unidirezionali RS422; l'elettronica slave minima si trova direttamente nei circuiti integrati (CI) del sensore. Se il master di interfaccia invia l'impulso di clock sulla linea master MA, l'elettronica slave risponde direttamente sulla linea di ritorno SL con i dati di posizione rilevati. I comandi o i parametri possono essere scambiati tramite impulsi di clock a modulazione di larghezza d'impulso (PWM), tuttavia questi non sono necessari per avviare il protocollo seriale bidirezionale sincrono (BiSS).
Ad ogni ciclo di dati il sistema master apprende e compensa il tempo di trasmissione del segnale, consentendo così una frequenza degli impulsi di clock fino a 10 Mbit/secondo anche per cavi lunghi 100 metri. Vengono corrette le variazioni delle condizioni del cavo, ad es. dovute a movimenti causati da forze di traino. La precisione di sincronizzazione tra più trasmettitori su diversi assi è entro 1 microsecondo ed il sistema master registra inoltre i precedenti tempi di trasmissione del segnale per la lettura del sistema di controllo e consente un'ulteriore ottimizzazione.
Il protocollo BiSS bidirezionale classifica ciascun dispositivo collegato per diversi tipi di dati: dati del sensore, dati multi-ciclo e dati di registro. Questi tipi di sensori di dati sono progettati in modo diverso per quanto riguarda la relativa facilità di accesso e le prestazioni di trasmissione, al fine di coprire un gran numero di applicazioni di sensori. Le comunicazioni bidirezionali dei parametri per la configurazione dei dispositivi, possibilmente anche per i cosiddetti parametri delle apparecchiature originali (OEM), sono di solito registrate nell'area dei dati di registro.
I dati che cambiano lentamente, come il conteggio dei giri o la temperatura del motore, vengono registrati nell'area dei dati multi-ciclo, mentre i dati angolari che cambiano rapidamente vengono registrati nell'area dei dati del sensore. Ciò significa che anche i tempi di ciclo del controller inferiori a 10 μs non sono un problema per le stringhe di dati fino a 64 bit. Lo spazio disponibile è sufficiente per sistemi ridondanti e di solito viene utilizzato per un'implementazione CRC (Cyclic Redundancy Check). Solo entro un bit di avvio e un bit di arresto, i dati del sensore vengono trasmessi con la migliore velocità di trasmissione dati utente possibile; un singolo bit di dati multi-ciclo è opzionale. I bit di dati multi-ciclo, anch'essi registrati quando vengono attivati, formano un secondo protocollo in banda e contribuiscono a ridurre il volume di dati del sensore richiesto. Il monitoraggio permanente della posizione e del funzionamento dell'azionamento è possibile senza disturbare il ciclo del controller.
Gli sviluppi specifici dei dispositivi da parte dei singoli utenti non sono limitati o resi inutilmente costosi dalla necessità di compatibilità con altri prodotti BiSS. Un dispositivo collegato BiSS bidirezionale viene descritto con soli pochi parametri, un file di descrizione del dispositivo in formato XML fornito con esso semplifica la messa in servizio del sistema di controllo. Panoramica: encoder assoluto (trasmettitore di valore): interfaccia digitale open source per sensori (BiSS) con trasmissione seriale sincrona (SSI), INTERBUS CANopen DeviceNet Profibus-DP.