
Die bidirektionale digitale Sensor-Schnittstelle BiSS sichert die Kommunikation zwischen Positionsgeber und Messgerät bzw. Antriebssteuerung und überträgt bei Bedarf gleichzeitig Messwerte von bis zu 8 Sensoren. Für 1 bis 8 Teilnehmer liefert der Interface-Master das Taktsignal zur gleichzeitigen Erfassung aller Positionsdaten sowie für die sich anschließende synchronserielle Datenübertragung.
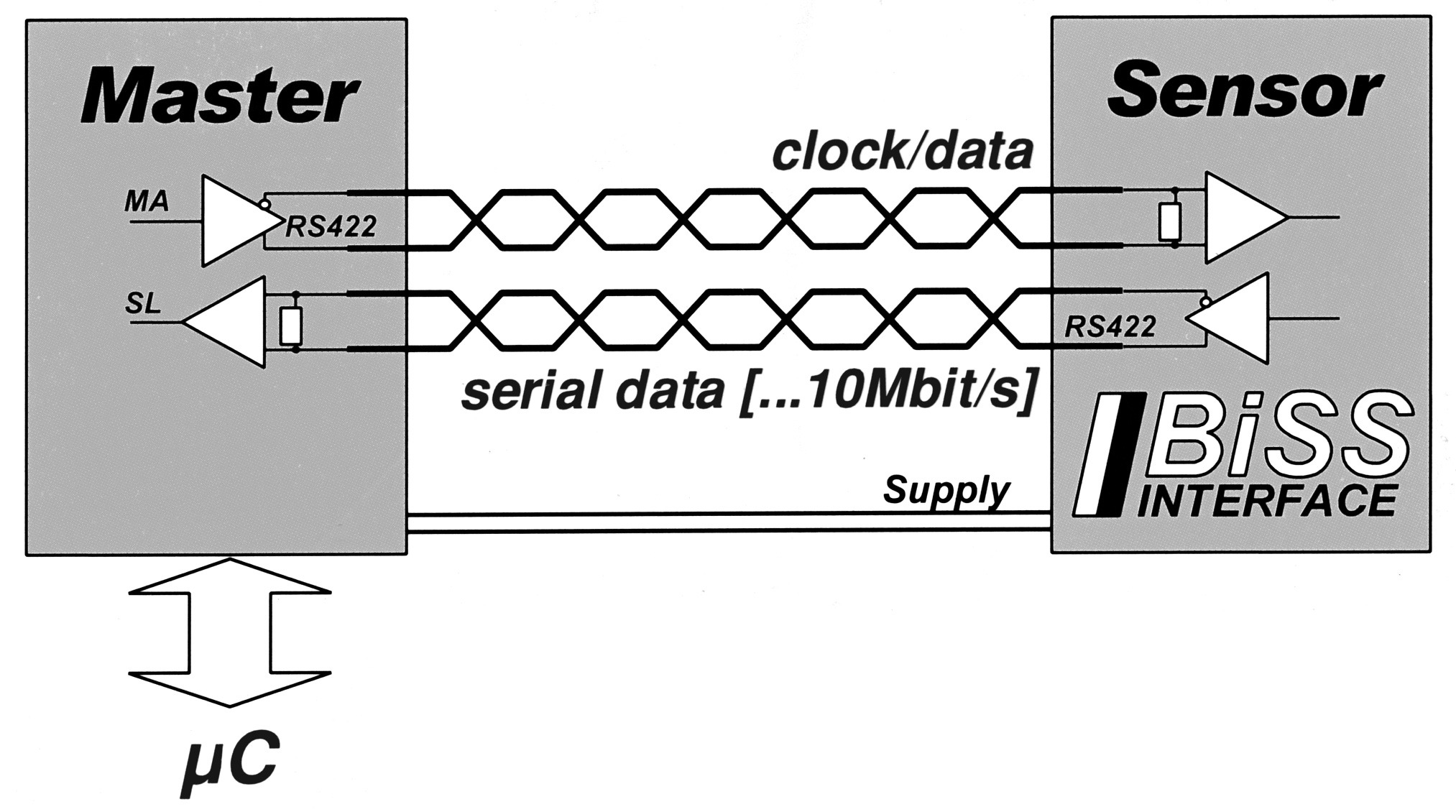
Nur vier uni-direktionale RS422-Datenleitungen sind erforderlich; die minimale Slave-Elektronik findet direkt in den Sensor-ICs Platz. Sendet der Master auf Leitung MA den Takt, antwortet der Slave auf der Rückleitung SL mit den erfassten Positionsdaten direkt. Befehle oder Parameter sind über eine PWM-Taktform austauschbar, für den Aufstart des BiSSProtokolls jedoch nicht erforderlich.
Mit jedem Datenzyklus erlernt und kompensiert der Master die Signallaufzeit und ermöglicht dadurch Taktraten bis 10 MBit/s auch für Kabellängen von 100m. Veränderliche Kabelbedingungen, z.B. durch Bewegung im Schlepp, werden korrigiert. Die Synchronisierungsgenauigkeit unter mehreren Gebern an verschiedenen Achsen liegt unter 1 Mikrosekunde, zudem hält der Master die erfahrenen Signallaufzeiten für die Steuerung transparent und ermöglicht eine weitere Optimierung.
Das BiSS-Protokoll klassifiziert jeden Teilnehmer in verschiedene Datenbereiche: Sensordaten, Multi-Cycle-Daten und Registerdaten. Diese Datenbereiche sind hinsichtlich der Zugriffsmöglichkeit und Übertragungsperformance unterschiedlich ausgelegt, um eine Vielzahl von Sensorapplikationen abzudecken. Eine bidirektionale Parameter-Kommunikation zur Gerätekonfiguration, ggf. auch für sogenannte OEM-Parameter, wird üblicherweise im Registerdatenbereich platziert. Langsam veränderliche Daten wie Umdrehungszählung oder Motortemperatur belegen den Multi-Cycle-Datenbereich, schnell veränderliche Winkeldaten den Sensordatenbereich. Hiermit sind Reglerzykluszeiten unter 10 μs auch für Datenwörter bis 64 Bit kein Problem. Genügend Raum für Redundanz ist vorhanden und wird in der Regel für eine CRC-Implementierung genutzt (Cyclic Redundancy Check). Nur durch ein Start- und ein Stop-Bit gerahmt, werden die Sensordaten mit bestmöglicher Nutzdatenrate übertragen; ein einzelnes Multi-Cycle-Datenbit ist optional. Ebenfalls getriggert erfasst, bilden die Multi-Cycle- Datenbits ein zweites In-Band-Protokoll und tragen zur Entlastung der Sensordaten bei - eine permanente Lage- und Betriebsüberwachung des Antriebs ist möglich, ohne den Reglerzyklus zu stören.
Spezifische Geräte-Entwicklungen einzelner Anwender werden nicht durch den Zwang zur Kompatibilität mit anderen BiSSProdukten eingeengt oder unnötig verteuert. Ein BiSS-Teilnehmer ist mit einigen wenigen Parametern beschrieben, eine mitgelieferte XML-Geräte-Beschreibungsdatei vereinfacht die Inbetriebnahme der Steuerung.